Gps спутниковый. Спутниковая система навигации. Навигационные программы для смартфонов
65 нанометров - следующая цель зеленоградского завода «Ангстрем-Т», которая будет стоить 300-350 миллионов евро. Заявку на получение льготного кредита под модернизацию технологий производства предприятие уже подало во Внешэкономбанк (ВЭБ), сообщили на этой неделе «Ведомости» со ссылкой на председателя совета директоров завода Леонида Реймана. Сейчас «Ангстрем-Т» готовится запустить линию производства микросхем с топологией 90нм. Выплаты по прошлому кредиту ВЭБа, на который она приобреталась, начнутся в середине 2017 года.
Пекин обвалил Уолл-стрит
Ключевые американские индексы отметили первые дни Нового года рекордным падением, миллиардер Джордж Сорос уже предупредил о том, что мир ждет повторение кризиса 2008 года.
Первый российский потребительский процесор Baikal-T1 ценой $60 запускают в массовое производство
Компания «Байкал Электроникс» в начале 2016 года обещает запустить в промышленное производство российский процессор Baikal-T1 стоимостью около $60. Устройства будут пользоваться спросом, если этот спрос создаст государство, говорят участники рынка.
МТС и Ericsson будут вместе разрабатывать и внедрять 5G в России
ПАО "Мобильные ТелеСистемы" и компания Ericsson заключили соглашения о сотрудничестве в области разработки и внедрения технологии 5G в России. В пилотных проектах, в том числе во время ЧМ-2018, МТС намерен протестировать разработки шведского вендора. В начале следующего года оператор начнет диалог с Минкомсвязи по вопросам сформирования технических требований к пятому поколению мобильной связи.
Сергей Чемезов: Ростех уже входит в десятку крупнейших машиностроительных корпораций мира
Глава Ростеха Сергей Чемезов в интервью РБК ответил на острые вопросы: о системе «Платон», проблемах и перспективах АВТОВАЗа, интересах Госкорпорации в фармбизнесе, рассказал о международном сотрудничестве в условиях санкционного давления, импортозамещении, реорганизации, стратегии развития и новых возможностях в сложное время.
Ростех "огражданивается" и покушается на лавры Samsung и General Electric
Набсовет Ростеха утвердил "Стратегию развития до 2025 года". Основные задачи – увеличить долю высокотехнологичной гражданской продукции и догнать General Electric и Samsung по ключевым финансовым показателям.
Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
Московский авиационный институт
(Национальный исследовательский университет)
Реферат по курсу «ОСНИ»
«Глобал ьные Навигационные Спутниковые Системы (GNSS)»
Выполнила студентка группы: 60-107Б
Рябчикова Мария
Принял преподаватель кафедры 604:
Малышев.В.В
Научный руководитель: Гришин.В.М
Москва 2014 г.
Введение
1. Спутниковые системы радиоместоопределения
1.1 Исторический экскурс
2. Система местоопределения, использующая специализированную спутниковую радионавигационную систему
3. Система местоопределения, использующая геостационарные спутники связи
4. Глобальная навигационная спутниковая система ГЛОНАСС
5. Система Глобального Позиционирования (GPS)
5.1 Применение GPS
5.2 Точность
6. Сравнение GPS и ГЛОНАСС
7. Приёмники GPS
Заключение
Литература
Введение
С давних времён путешественники задавались вопросом: как определить своё местоположение на Земле? Древние мореплаватели ориентировались по звёздам, однако погодные условия не всегда были
на руку исследователям, поэтому сбиться с курса не представляло особого труда. С появлением компаса
задача существенно упростилась. Путешественник уже в меньшей мере зависел от погоды.
Эра радио открыла новые возможности перед человеком. С появлением радиолокационных станций, когда стало возможным измерять параметры движения и относительное местоположение объекта по отражённому от его поверхности лучу радиолокатора, встал вопрос о возможности измерения параметров движения объекта по излучаемому сигналу. В 1957 году в СССР группа учёных под руководством В. А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственного спутника Земли (ИСЗ) по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником. Но, что самое главное, была установлена и возможность решения обратной задачи -- нахождения координат приёмника по измеренному доплеровскому сдвигу.
В данном реферате рассматривается ГЛОНАСС-Глобальная навигационная система, её состав и принцип действия. А так же история развития системы глобального позиционирования, общий принцип определения координат с помощью GPS.
Сокращения и определения.
Позиционирование - определение своего местоположения в пространстве
GPS - Глобальная Система Позиционирования (Global Positioning System - англ.)
GNSS - Глобальная Навигационная Спутниковая Система (Global Navigation Satellites System - англ.)
NAVSTAR - измерение времени и расстояния от навигационных спутников (NAVigation Satellites providing Time And Range - англ.)
ГЛОНАСС - Глобальная Навигационная Спутниковая Система
Эфемерида - спрогнозированные параметры орбиты и их производные
Альманах - набор сведений, о текущем состоянии навигационной системы в целом, включая загрублённые эфемериды применяемые для поиска видимых спутников и выбора оптимального созвездия и содержащих сведения.
SPS (Standard Positioning Service) -- стандартная точность измерений.
PPS (Precise Positioning Service) -- прецизионное определение местоположения.
СРНС - спутниковая радионавигационная система
ЕС КВО - Единая глобальная система координатно-временного обеспечения
КА - космический аппарат
НКА - навигационный КА
UTC - координированное всемирное время
1 . Спутниковые системы радиоместоопределения.
спутниковый навигационный система
Спутниковые системы радиоместоопределения - сравнительно новая, быстро развивающаяся ветвь навигации или отслеживания перемещения подвижных объектов.
1 .1 Исторический экскурс
Развитие отечественной спутниковой радионавигационной системы (СРНС) ГЛОНАСС имеет уже практически сорокалетнюю историю, начало которой положено, как чаще всего считают, запуском 4 октября 1957 г. в Советском Союзе первого в истории человечества искусственного спутника Земли (ИСЗ). Измерения доплеровского сдвига частоты передатчика этого ИСЗ на пункте наблюдения с известными координатами позволили определить параметры движения этого спутника.
Эффект Допплера (по имени австрийского физика К. Допплера) состоит в изменении регистрируемой приемником частоты колебаний или длины волны при относительном движении приемника и источника этих колебаний.
Обратная задача была очевидной: по измерениям того же доплеровского сдвига при известных координатах ИСЗ найти координаты пункта наблюдения.
Научные основы низкоорбитальных СРНС были существенно развиты в процессе выполнения исследований по теме "Спутник" (1958--1959 гг.). Основное внимание при этом уделялось вопросам повышения точности навигационных определений, обеспечения глобальности, круглосуточности применения и независимости от погодных условий.
Проведенные работы позволили перейти в 1963 г. к опытно-конструкторским работам над первой отечественной низкоорбитальной системой, получившей в дальнейшем название "Цикада".
В 1979 г. была сдана в эксплуатацию навигационная система 1-го поколения "Цикада" в составе 4-х навигационных спутников (НС), выведенных на круговые орбиты высотой 1000км, наклонением 83° и равномерным распределением плоскостей орбит вдоль экватора. Она позволяет потребителю в среднем через каждые полтора-два часа входить в радиоконтакт с одним из НС и определять плановые координаты своего места при продолжительности навигационного сеанса до 5 ... 6 мин.
В ходе испытаний было установлено, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутниками собственных эфемерид, которые определяются и закладываются на спутники средствами наземного комплекса управления. Поэтому наряду с совершенствованием бортовых систем спутника и корабельной приемоиндикаторной аппаратуры, разработчиками системы серьезное внимание было уделено вопросам повышения точности определения и прогнозирования параметров орбит навигационных спутников.
Была отработана специальная схема проведения измерений параметров орбит средствами наземно-комплексного управления, разработаны методики прогнозирования, учитывающие все гармоники в разложении геопотенциала.
Проведены работы по уточнению координат измерительных средств и вычислению коэффициентов согласующей модели геопотенциала, предназначенной специально для определения и прогнозирования параметров навигационных орбит. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок и составляет в настоящее время на интервале суточного прогноза величину » 70 ... 80 м, а среднеквадратическая погрешность определения морскими судами своего местоположения уменьшилась до 80 ... 100 м.
ЭФЕМЕРИДЫ (в астрономии) - координаты небесных светил, параметры орбит спутников и другие переменные астрономические величины, вычисленные для ряда последовательных моментов времени и сведенные в таблицы.
Для оснащения широкого класса морских потребителей разработаны и серийно изготавливаются комплектации приемоиндикаторной аппаратуры "Шхуна" и "Челн". В дальнейшем спутники системы "Цикада" были дооборудованы приемной измерительной аппаратурой обнаружения терпящих бедствие объектов, которые оснащаются специальными радиобуями, излучающими сигналы бедствия на частотах 121 и 406 Мгц. Эти сигналы принимаются спутниками системы "Цикада" и ретранслируются на специальные наземные станции, где производится вычисление точных координат аварийных объектов (судов, самолетов и др.).
Дооснащенные аппаратурой обнаружения терпящих бедствие спутники "Цикада" образуют системы "Коспас". Совместно с американо-франко-канадской системой "Сарсат" они образуют единую службу поиска и спасения, на счету которой уже несколько тысяч спасенных жизней.
Успешная эксплуатация низкоорбитальных спутниковых навигационных систем морскими потребителями привлекла широкое внимание к спутниковой навигации. Возникла необходимость создания универсальной навигационной системы, удовлетворяющей требованиям всех потенциальных потребителей: авиации, морского флота, наземных транспортных средств и космических кораблей.
В 1995 г. было завершено развертывание СРНС ГЛОНАСС до ее штатного состава (24 НС). В настоящее время предпринимаются большие усилия по поддержанию группировки. Разработаны самолетная аппаратура АСН-16, СНС-85, АСН-21, наземная аппаратура АСН-15 (РИРВ), морская аппаратура "Шкипер" и "Репер" (РНИИ КП) и др.
Основным заказчиком и ответственным за испытания и управление системами являются Военно-космические силы РФ.
В рассматриваемый период времени в США также проведены интенсивные разработки СРНС. В 1958 г. в рамках создания первого поколения атомных ракетных подводных лодок "Полярис" была создана система "Транзит" (аналог СРНС "Цикада"), введенная в строй в 1964 г.
В начале 70-х годов начаты работы по созданию СРНС второго поколения -- ОР5/"Навстар" (аналога отечественной системы ГЛОНАСС). Спутниковая радионавигационная система GPS полностью развернута в 1993.
В данном реферате рассматриваются системы радиоместоопределения (в дальнейшем - местоопределения), задачей которых является контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов.
Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом подвижный объект, ИСЗ и наземная станция оснащаются радиотехническим оборудованием в зависимости от используемой конфигурации системы и метода определения координат объекта. Далее будут рассмотрены три наиболее распространенных типа конфигурации систем местоопределения.
2 . Система местоопределения, использующая специализированную спутник овую радионавигационную систему
Спутниковой радионавигационной системой принято называть систему, в которой группировка ИСЗ выполняет роль опорных радионавигационных точек. К числу таких систем относятся NAVSTAR (США) и "Глонасс" (Россия). NAVSTAR (NAVigation System using Timing And Ranging) или GPS (Global Positioning System)
Эти системы относятся к категории пассивных систем с самоопределением. В них радиопередатчик имеется только на навигационных ИСЗ, а аппаратура, размещаемая на подвижном объекте, имеет только приемник сигналов ИСЗ, устройство обработки сигналов и вычисления координат объекта. В данных навигационных системах результаты вычисления координат объекта имеются только на самом объекте, т.е. аппаратура объекта сама определяет свои координаты. Общепринятое название этой аппаратуры -- аппаратура потребителя спутниковой навигации (АПСН).
Аппаратура, устанавливаемая на подвижном объекте -- аппаратура потребителя, осуществляет прием на направленную антенну навигационных сигналов одновременно от нескольких ИСЗ (не менее 4-х), находящихся в зоне видимости. По поступающей от ИСЗ кодовой информации о параметрах излучаемого со спутника сигнала, а также данных об орбитальных параметрах движения ИСЗ (эфемеридная информация) в ЭВМ аппаратуры потребителя по заложенным алгоритмам определяются географические координаты подвижного объекта, скорость и направление движения.
Данные о координатах и скорости подвижного объекта могут представляться потребителю в визуальной форме на табло и запоминаются с регистрацией времени измерения.
Для передачи навигационных параметров подвижного объекта в центр сбора данных на подвижном объекте используется отдельный канал связи подвижной спутниковой службы (ПСС). В данной схеме указан канал спутниковой связи подвижного объекта с наземной станцией центра сбора через геостационарный спутник связи (ГСС). Сеанс измерения навигационных параметров и их передача от подвижного объекта включается по запросу из центра сбора При этом не требуется вмешательства оператора на подвижном объекте.
Глобальная спутниковая радионавигационная система NAVSTAR (NAV igation System using Timing And Ranging) или GPS (Global Positioning System) создана для высокоточногонавигационно-временного обеспечения объектов, движущихся в космосе, воздухе, на земле и в воде.
В ее состав входят навигационные спутники, наземный комплекс управления и аппаратура потребителей (пользователей). Применяемый в системе принцип состоит в том, что специальные приемники, установленные у потребителей, измеряют дальности до нескольких спутников и определяют свои координаты по точкам пересечения поверхностей равного удаления. Величина временной задержки определяется сопоставлением кодов сигналов, излучаемых спутником и генерируемых приемным устройством, методом временного сдвига до их совпадения Временной сдвиг определяется по часам приемника. Для нахождения широты, долготы, высоты и исключения ошибок в определении временного сдвига, приемник пользователя должен “видеть” и принимать навигационные сигналы от четырех спутников.
Скорость определяется по доплеровскому сдвигу несущей частоты сигнала спутника, вызываемому движением пользователя. Доплеровский сдвиг замеряется при сопоставлении частот сигналов, принимаемых от спутника и генерируемых приемником.
Навигационные сигналы излучаются на двух частотах L-диапазона (L-band, полосы радиочастот от 390 до 1550 МГц); 1575,42 МГц (L1) и 1227,6 МГц (L2). На L2 излучаются сигналы с военным кодом P(Y) с высокоточной информацией и защищенным от имитационных помех.
P-код представляет из себя последовательность псевдослучайных бистабильных манипуляций фазы несущей частоты с частотой следования,равной 10,23 МГц и периодом повторения в 267 суток. Каждый недельный сегмент этого кода является уникальным для одного из спутников GPS и непрерывно генерируется им в течение каждой недели, начиная с ночи с субботы на воскресенье. На L1 излучаются сигналы и с военным кодом P(Y) и с общедоступным гражданским кодом, который часто называют C/A. Прием сигналов по коду P(Y) обеспечивает работу с высокой точностью измерений. Сравнение времени приходасигналов на частотах L1 и L2 позволяет вычислить дополнительную задержку, возникающую при прохождении радиоволн через ионосферу, что значительно повышает точность измерений навигационных данных.
Прием сигналов на частоте L1 с кодом C/A не позволяет определить ошибки, вносимые ионосферой. Структура кода C/A обеспечивает худшие характеристики в режиме SPS (стандартная точность измерений). Так, если в режиме PPS с вероятностью 0,95 ошибки измерения долготы и широты не превышают 22-23 метра, высоты - 27-28 метров и времени - 0,09 мкс, то в SPS они увеличиваются соответственно до 100 метров, 140 метров и 0,34 мкс. Первоначально режим SPS был необходим для грубого определения пользователями своих координат для вхождения в код P(Y). В настоящее время уровень электроники программного обеспечения и методов обработки навигационной информации позволяет осуществлять достаточно быстрый захват P(Y) без кода С/А, а также проводить высокоточные определения по фазе несущей сигнала. Кроме того, полностью отработанный наземныйавтоматический режим дифференциальной коррекции позволяет в ограниченном регионе получать точное определение относительных координат взаимного расположения двух приемников, отслеживающих сигналы одних и тех же ИСЗ GPS. При использовании гражданского C/A- кода определяют координаты автомобиля с точностью от 2 до 5 метров.
28 марта 1994 года система GPS начала функционировать в штатнойконфигурации-24 КА в 6 орбитальных плоскостях. Запуском 17 января 1997 г, который закончился аварией, должен был начаться этап замены ИСЗ серий 2 и 2А новыми аппаратами 2R. Компания LOCKHEED MARTIN изготавливает 21 аппарат этой серии, которые планируется запустить до 2001 г.
Габаритные размеры корпуса ИСЗ - 1.52 м 1.93 м 1.91 м, размах солнечных батарей 19.3 м, площадь 13.4 кв. м. Мощность бортовой системы электропитания к концу срока эксплуатации 1136 Вт. Масса аппарата при запуске 2032 кг, на рабочей орбите 1075 кг. Навигационную аппаратуру поставляет ITT AEROSPASE/COMMUNICATIONS.
Новые спутники имеют трехосную стабилизацию и позволят обеспечить определение времени с точностью до 0.000001 сек, положение объекта с точностью до единиц метров и скорость - примерно до 0.1 м/сек. Срок службы увеличен до 10 лет по сравнению с 7 годами для ИСЗ типа 2А. Стоимость ИСЗ серии 2R составляет 40 млн. долл.
Группировка из 24 ИСЗ ГЛОНАСС выведена на орбиту и позволяет определить координаты с погрешностью не более 50 м для гражданского кода. Создан наземный сегмент управления спутниками, разработанный в СССР и реализованный Россией. В настоящее время в России отсутствует серийный производитель абонентской аппаратуры ГЛОНАСС для гражданского пользования. Структура орбитальной группировки и наблюдаемость ИСЗ системы даны в приложении.
3 . Система местоопределения, использующая геостационарные спутники связи
Широкое развитие спутниковой связи на основе геостационарных спутников, вращающихся на экваториальных орбитах с периодом 24 часа, позволили использовать эти спутники как неподвижные опорные радионавигационные точки для измерения относительно них координат подвижных объектов.
Схема построения системы местоопределения с двумя геостационарными спутниками связи представлена на Рис. 2. Примером таких систем могут служить системы EUTELTRACS (ECA) и GEOSTAR (США).
Спутники ГСС-1 и ГСС-2 не являются составной частью системы местоопределения, они выполняют роль ретрансляторов сигналов в линии радиосвязи между наземной станцией центра сбора и аппаратурой подвижного объекта.
При этом ГСС-1 обеспечивает ретрансляцию сигналов от наземной станции к подвижному объекту и обратно, а ГСС-2 только от подвижного объекта к наземной станции.
Координаты подвижного объекта вычисляются на наземной станции по сигналам, полученным от подвижного объекта с двух направлений (от ГСС-1 и ГСС-2). система четырех объектов, в которой координаты трех объектов ГСС-1, ГСС-2 и наземной станции известны, позволяет по методу триангуляции рассчитать координаты четвертого объекта, если измерить дальности от подвижного объекта до ГСС-1 и ГСС-2. Приближенно это можно представить следующим образом. Если измерены дальности от ГСС-1 и ГСС-2 до объекта L1 и L2, то подвижный объект находится на линии пересечения двухсфер, описанных радиусом L1 с центром на ГСС-1 и радиусом L2 с центром на ГСС-2. Пересечение же этой линии с поверхностью Земли даст точку местоположения подвижного объекта.
Значения L1 и L2 определяются вычитанием из известных расстояний от наземной станции до ГСС-1 и ГСС-2 дальностей от наземной станции до подвижного объекта через ГСС-1 и ГСС-2 соответственно. Эти дальности определяются на наземной станции по временной задержке между запросным сигналом от наземной станции и ответными сигналами от подвижного объекта, принимаемыми через ГСС-1 и ГСС-2.
Полученные на наземной станции координаты подвижного объекта могут быть переданы ему по каналу связи через ГСС-1.
Аппаратура каждого подвижного объекта имеет свой код, что позволяет наземнойстанции устанавливать связи одновременно со всеми объектами, с группой или с одним.
В нормальном состоянии аппаратура на подвижном объекте находится в пассивном режиме (прием сигналов от наземной станции). Активизация (включение передатчика) аппаратуры осуществляется по запросу от наземной станции.
Наземная станция и центр сбора могут быть совмещены или соединены между собой отдельным каналом связи (радиорелейным, телефонным, спутниковым).
4 . Глобальная навигационная спутниковая система ГЛОНАСС
Система ГЛОНАСС (Глобальная навигационная спутниковая система) предназначена для определения местоположения, скорости движения и точного времени морских, воздушных, сухопутных транспортных средств и других видов потребителей. Она разрабатывалась и внедрялась как система
двойного назначения, в первую очередь, для обеспечения национальной безопасности России, а также для решения гражданских научных и производственных задач.
Система ГЛОНАСС создавалась с начала 70-х годов большой кооперацией научных гражданских и военных организаций. Первые космические аппараты серии ГЛОНАСС («Космос-1413», «Космос-1414», «Космос-1415») были выведены на орбиты 12 октября 1982 года. Запуск осуществляется ракетоносителями «Протон» с космодрома Байконур.
В декабре 1995 года было завершено полное развёртывание орбитальной группировки системы ГЛОНАСС, что позволило создать сплошное глобальное навигационное полевплоть до высот 2000 км.
Система ГЛОНАСС одобрена международными организациями морского флота (ИМО) и гражданской авиации (ИКАО), как один из элементов Глобальной навигационной спутниковой системы наряду с американской системой GPS. В 1994 году система ГЛОНАСС запатентована в США.
Задачи, возложенные на систему ГЛОНАСС:
1. создание (задание) общеземной геодезической и геоцентрической систем координат;
2. распространение единой глобальной высокоточной шкалы времени;
3. создание общеземной сети слежения за современными движениями земной коры;
4. координатно-временное обеспечение o операций в космическом пространстве; o международной службы вращения Земли; o процесса дистанционного зондирования Земли, осуществляемого в интересах
картографирования планеты, мониторинга экологического состояния её поверхности и атмосферы; o работ, реализуемых методом спутниковой альтиметрии с целью слежения за уровнем мирового океана, изучения его физической поверхности, в частности морской топографической поверхности и её отличий от поверхности геоида (квазигеоида), а также изучения закономерностей глобальной циркуляции водных масс.
Основу системы ГЛОНАСС составляют три сегмента:
* космический сегмент;
* сегмент управления;
* сегмент потребителей. 2
Сегменты системы ГЛОНАСС
Космический сегмент включает 24 спутника, излучающих непрерывные радионавигационные сигналы, которые формируют сплошное радионавигационное поле на поверхности Земли и околоземном пространстве.
В системе ГЛОНАСС используются навигационные космические аппараты (НКА), вращающиеся по круговой геостационарной орбите на высоте ~ 19100 км. Период обращения спутника вокруг Земли равен в среднем 11 часам 45 минутам. Время эксплуатации спутника -- 5 лет; за этот период параметры орбиты спутника не должны отличаться от номинальных значений более чем на 5 %.
Сегмент управления -- наземная система управления, предназначенная для контроля функционирования, непосредственно управления и информационного обеспечения сети спутников.
Сегмент потребителя обеспечивает определение пространственных координат,вектора скорости, текущего времени и других навигационных параметров в результате приёма и обработки радиосигналов, принимаемых от спутников. Из этих трёх частей последняя, а именно аппаратура пользователей, самая многочисленная.
Система ГЛОНАСС является беззапросной, поэтому количество потребителейсистемы не ограничено. Помимо основной функции -- навигационных определений, -- система позволяет производить высокоточную взаимную синхронизацию стандартов частоты и времени на удалённых наземных объектах и взаимную геодезическую привязку.
История развития системы
Первый спутник ГЛОНАСС был выведен Советским Союзом на орбиту 12 октября 1982 года. 24 сентября 1993 года система была официально принята в эксплуатацию с орбитальной группировкой из 12 спутников. В декабре 1995 года спутниковая группировка была развернута до штатного состава -- 24 спутника.
Вследствие недостаточного финансирования, а также из-за малого срока службы, число работающих спутников сократилось к 2001 году до 6.
В августе 2001 года была принята федеральная целевая программа «Глобальная навигационная система», согласно которой полное покрытие территории России планировалось уже в начале 2008 года, а глобальных масштабов система достигла бы к началу 2010 года. Для решения данной задачи планировалось в течение 2007, 2008 и 2009 годов произвести шесть запусков РН и вывести на орбиту 18 спутников -- таким образом, к концу 2009 года группировка вновь насчитывала бы 24 аппарата.
В конце марта 2008 года совет главных конструкторов по российской глобальной навигационной спутниковой системе (ГЛОНАСС), заседавший в Российском научно-исследовательском институте космического приборостроения, несколько скорректировал сроки развёртывания космического сегмента ГЛОНАСС. Прежние планы предполагали, что на территории России системой станет возможно пользоваться уже к 31 декабря 2007 года; однако для этого требовалось 18 работающих спутников, некоторые из которых успели выработать свой гарантийный ресурс и прекратили работать. Таким образом, хотя в 2007 году план по запускам спутников ГЛОНАСС был выполнен (на орбиту вышли шесть аппаратов), орбитальная группировка по состоянию на 27 марта 2008 года включала лишь шестнадцать работающих спутников. 25 декабря 2008 года количество было доведено до 18 спутников.
На совете главных конструкторов ГЛОНАСС план развёртывания системы был скорректирован с той целью, чтобы на территории России система ГЛОНАСС заработала хотя бы к 31 декабря 2008 года. Прежние планы предполагали запуск на орбиту двух троек новых спутников «Глонасс-М» в сентябре и в декабре 2008 года; однако в марте 2008 года сроки изготовления спутников и ракет были пересмотрены, чтобы ввести все спутники в эксплуатацию до конца года. Предполагалось, что запуски состоятся раньше на два месяца и система до конца года в России заработает. Планы были реализованы в срок.
В ноябре 2009 года было объявлено, что Украинский научно-исследовательский институт радиотехнических измерений (Харьков) и Российский научно-исследовательский институт космического приборостроения (Москва) создадут совместное предприятие. Стороны создадут систему спутниковой навигации для обслуживания потребителей на территории двух стран. В проекте будут использованы украинские станции коррекции для уточнения координат систем ГЛОНАСС.
15 декабря 2009 года на встрече премьер-министра России Владимира Путина с главой Роскосмоса Анатолием Перминовым было заявлено, что развёртывание ГЛОНАСС будет окончено к концу 2010 года.
С переходом на спутники «Глонасс-К» точность системы ГЛОНАСС станет сопоставимой с точностью американской навигационной системы NAVSTAR GPS -- единственной зарубежной развернутой навигационной системой.
02 сентября 2010г. группировка спутников пополнена еще 3 спутниками и общее количество спутников в группировке доведено до 26ед.
5 . Система Глобального Позиционирования (GPS)
Global Positioning System (GPS) - спутниковая система определения местонахождения подвижных объектов.
Система GPS создана министерством обороны США и позволяет с точностью до 20 м определять в любой точке земного шара место нахождения неподвижного либо движущегося объекта на земле, в воздухе и на море в трех измерениях с очень высокой точностью. Более того, GPS сообщает скорость передвижения объекта. Эта система позволяет оснастить речные и морские суда, автомобили, самолеты электронными картами, на которых показывается место нахождения объекта и кратчайший (либо наиболее удобный) путь к пункту назначения. GPS используется также для составления географических карт и в задачах геодезии. Система широко используется и гражданскими абонентами.
Система создана в спутниковой сети, образованной спутниками связи, вращающимися вокруг земли по высоким орбитам. В 1995 г. сеть имела 24 спутника. Для вхождения в GPS каждый абонент должен иметь небольшое устройство. Последнее в бытовом варианте имеет размер, равный портсигару, что позволяет носить его в кармане костюма. Устройство с высокой точностью показывает три координаты объекта, находящегося в любой точке планеты. Одним из важнейших компонентов устройства являются атомные часы, способные измерять время с точностью до наносекунды. Сигналы устройства синхронизируются с приемо-передатчиками спутников связи.
5 .1 Применение GPS
Несмотря на то, что изначально проект GPS был направлен на военные цели, сегодня GPS всё чаще используются в гражданских целях. GPS-приёмники продают во многих магазинах, торгующих электроникой, их встраивают в мобильные телефоны, смартфоны, КПК и онбордеры. Потребителям также предлагаются различные устройства и программные продукты, позволяющие видеть своё местонахождение на электронной карте; имеющие возможность прокладывать маршруты с учётом дорожных знаков, разрешённых поворотов и даже пробок; искать на карте конкретные дома и улицы, достопримечательности, кафе, больницы, автозаправки и прочие объекты инфраструктуры.
Геодезия : с помощью GPS определяются точные координаты точек и границы земельных участков.
Картография : GPS используется в гражданской и военной картографии.
Навигация : с применением GPS осуществляется как морская так и дорожная навигация.
С помощью GPS ведётся мониторинг за положением, скоростью автомобилей, контроль за их движением.
Сотовая связь : первые мобильные телефоны с GPS появились в 90-х годах. В некоторых странах, например США это используется для оперативного определения местонахождения человека, звонящего 911. В России в 2010 году начата реализация аналогичного проекта -- Эра-глонасс.
Тектоника, Тектоника плит : с помощью GPS ведутся наблюдения движений и колебаний плит.
Активный отдых : есть разные игры, где применяется GPS, например, Геокэшинг и др.
Геотегинг : информация, например фотографии «привязываются» к координатам благодаря встроенным или внешним GPS-приёмникам.
5 .2 Точность
Типичная точность современных GPS-приёмников в горизонтальной плоскости составляет примерно 10-12 метров при хорошей видимости спутников (такая же как и у ГЛОНАСС). На территории США и Канады имеются станции WAAS, передающие поправки для дифференциального режима, что позволяет снизить погрешность до 1-2 метров на территории этих стран. при использовании более сложных дифференциальных режимов, точность определения координат можно довести до 10 см. К сожалению точность любой СНС сильно зависит от открытости пространства, от высоты используемых спутников над горизонтом.
6 . Сравнение GPS и ГЛОНАСС
Системы GPS и ГЛОНАСС во многом подобны, но имеют и различия.Они разрабатывались с учетом наиболее вероятных областей применения. Поэтому ГЛОНАСС имеет преимущества на высоких широтах, а GPS -- на средних.
Недостатками ГЛОНАСС являются:
Необходимость сдвига диапазона частот вправо, так как в настоящее время ГЛОНАСС мешает работе как подвижной спутниковой связи,так и радиоастрономии;
при смене эфемерид спутников, погрешности координат в обычном режиме увеличиваются на 25--30м, а в дифференциальном режиме -- превышают 10 м;
при коррекции набежавшей секунды нарушается непрерывность сигнала ГЛОНАСС. Это приводит к большим погрешностям определения координат места потребителя, что недопустимо для гражданской авиации;
сложность пересчета данных систем ГЛОНАСС и GPS из-за отсутствия официально опубликованной матрицы перехода между используемыми системами координат.
Приемники, одновременно работающие с сигналами ИСЗ GPS и ГЛОНАСС, в Украине изготавливаются на ГП «Оризон» (г. Смела).
7 . Приёмники GPS
Приёмники GPS индивидуального пользования:
Наиболее распространенными являются приемники СРНС для индивидуального пользования водителями автомобильного транспорта. Они имеют размер карманного калькулятора с клавиатурой и жидкокристаллическим дисплеем, на котором отображаются координаты пользователя, курс, расстояние и направление до контрольных точек маршрута, пройденный маршрут движения, карта местности, параметры видимых спутников (рис. 6).
Стоимость такого приемника колеблется от 100 до 1000 долларов.
Для индивидуального пользования разработаны также устройства, которые представляют собой специальные портативные компьютеры с навигационной программой и цифровой картой, текущий фрагмент которой высвечивается на миниатюрном ЖК-дисплее. Примером могут служить приборы «CARIN» -- Car Information and Navigation (Philips), «Travelpilot» (Bosch) и др. Это, по сути, электронные лоцманы, дающие указания водителю синтезированным голосом, заранее сообщая обо всех поворотах, стоянках и прочих особенностях данного маршрута.
Для точного определения своего местонахождения компьютер получает информацию от трех источников: от GPS-приемника, от электронного компаса и от датчиков пройденного пути, установленных на колесах. В считанные секунды с момента включения зажигания (и питания) система определяет свое местонахождение с точностью +/- 100 м, а затем, используя базу данных в CD-ROM, уточняет его до +/- 10 м. Достаточно указать с помощью специальных символов на дисплее конец маршрута, и через 5 секунд компьютер выдаст оптимальную траекторию движения.
Наибольшее распространение эти системы получили в европейских странах, где почти для любой местности составлены электронные цифровые карты. Диапазон цен на это оборудование простирается от 1500 до 7500 DM. Но есть и более доступные по цене навигационные приборы, например «Филипс-Рутфайндер», которые по внешнему виду напоминают электронную записную книжку и стоят около 500 DM. Вводя с клавиатуры исходный пункт и место назначения, пользователь менее чем за минуту получает детальное описание маршрута, длительность пути, время прибытия в конечный пункт и другие параметры. База данных для вычислений хранится на магнитной карточке, которая вставляется в считывающее устройство «Рутфайндера». Этим прибором можно пользоваться даже при пеших прогулках по незнакомому городу (рис. 7).
Заключение
Спутниковые системы местоопределения GPS и ГЛОНАСС разрабатывались как чистонавигационные системы, и эти функции они выполняют блестяще. Но эксплуатация навигационных спутниковых систем, в первую очередь GPS, показала неоценимые возможности систем GPS и ГЛОНАСС в определении высокоточных координат для геодезии, геофизики, космоса, авиации и т. д.
Спутниковые навигационные системы открывают новые возможности для их использования в различных областях: поиске и спасении терпящих бедствие; предупреждении о катастрофах; сборе данных о состоянии окружающей среды; контроле контейнерных перевозок; навигации и управлении околоземными космическими аппаратами; обеспечении работ в геодезии и картографии; прокладке коммуникаций; геологоразведочных работах, разработке месторождений полезных ископаемых,включая участки прибрежных шельфов, и др.
Общее направление модернизации обоих спутниковых систем GPS и Глонасс связано с повышением точности навигационных определений, улучшением сервиса, предоставляемого пользователям, повышением срока службы и надёжностью бортовой аппаратуры спутников, улучшением совместимости с другими радиотехническими системами и развитием дифференциальных подсистем. Общее направление развития систем GPS и Глонасс совпадает, но динамика и достигнутые результаты сильно отличаются.
Совершенствование системы ГЛОНАСС планируется осуществлять на базе спутников нового поколения “ГЛОНАСС-М”. Этот спутник будет обладать увеличенным ресурсом службы и станет излучать навигационный сигнал в диапазоне L2 для гражданских применений.
Литература
1. ГЛОНАСС, Интерфейсный контрольный документ. КНИЦ, 1995.
2. GPS Interface Control Document (ICD-GPS-200), 1991.
3. http://www.bestreferat.ru/referat-86710.html
5. http://gps-club.ru/gps_think/detail.php?ID=20187
6. Богданов В.А., Сорочинский В.А., Якшевич Е.В. "Спутниковые системы морской навигации." - М.: Транспорт, 1987.
7. Баранов Ю.К. "Определение места судна с помощью навигационных спутников." - М.: Транспорт, 1984.
8.Соловьев Ю.А. Системы спутниковой навигации. М.: Эко-Трендз, 2000.
9.Глобальная спутниковая радионавигационная система ГЛОНАСС / Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина. М.: ИПРЖР, 1998.
10.Липкин И.А. Спутниковые навигационные системы. М.: Вузовская книга, 2001.
11.Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ. М.: КНИЦ ВКС, 1995.
Размещено на Allbest.ru
Подобные документы
Региональные спутниковые навигационные системы: Бэйдау, Галилео, индийская и квазизенитная. Принцип работы и основные элементы: орбитальная группировка, наземный сегмент и аппаратура потребителя. Создание карт для навигационных спутниковых систем.
курсовая работа , добавлен 09.03.2015
Навигационные измерения в многоканальной НАП. Структура навигационных радиосигналов в системе ГЛОНАСС и GPS. Точность глобальной навигации наземных подвижных объектов. Алгоритмы приема и измерения параметров спутниковых радионавигационных сигналов.
курсовая работа , добавлен 13.12.2010
Принципы функционирования спутниковых навигационных систем. Требования, предъявляемые к СНС: глобальность, доступность, целостность, непрерывность обслуживания. Космический, управленческий, потребительский сегменты. Орбитальная структура NAVSTAR, ГЛОНАСС.
доклад , добавлен 18.04.2013
Состояние внедрения ATN в практику воздушного движения. Спутниковые информационные технологии в системах CNS/ATM. Спутниковые радионавигационные системы. Координаты, время, движение навигационных спутников. Формирование информационного сигнала в GPS.
учебное пособие , добавлен 23.09.2013
Общая информация и история развития системы "Глонасс", хронология совершенствования. Спутниковые навигаторы. Точность и доступность навигации. Разработка и серийное производство бытовых Глонасс-приемников для потребителей. Двухсистемный GPS навигатор.
курсовая работа , добавлен 16.11.2014
Используемые спутниковые навигационные системы. Надёжность, объёмы оборудования локомотивов и сети референцных станций. Принцип работы терминала. Правила и нормы по оборудованию локомотивов средствами радиосвязи и помехоподавляющими устройствами.
курсовая работа , добавлен 25.02.2016
Изучение функционирования систем связи, которые можно разделить на: радиорелейные, тропосферные, спутниковые, волоконно-оптические. Изучение истории возникновения, сфер применения систем связи. Спутниковые ретрансляторы, магистральная спутниковая связь.
реферат , добавлен 09.06.2010
Методы определения пространственной ориентации вектора-базы. Разработка и исследование динамического алгоритма определения угловой ориентации вращающегося объекта на основе систем спутниковой навигации ГЛОНАСС (GPS). Моделирование алгоритма в MathCad.
дипломная работа , добавлен 11.03.2012
Преимущества спутниковой навигационной системы. Развитие радионавигации в США, России. Опробование основной идеи GPS. Сегодняшнее состояние NAVSTAR GPS. Навигационные задачи и методы их решения. Система глобального позиционирования NAVSTAR и ГЛОНАСС.
реферат , добавлен 18.04.2013
Параболические антенны, используемые в радиотехнических системах различного назначения (радиорелейные системы связи, радиолокация, спутниковые системы связи). Схема антенны. График амплитудного распределения по раскрыву и аппроксимирующей функции.
В этой статье мы расскажем про глобальные системы позиционирования, разработанные в США, России, ЕС и Китае; объясним, как поддержка технологий глобальной спутниковой навигации реализована в электронных устройствах, а также опишем ключевые и дополнительные функции современных навигационных приемников.
GPS
Система GPS (Global Positioning System) создавалась для применения в военных целях. Она начала работать в конце 80-х - начале 90-х годов, однако до 2000 года искусственные ограничения на определение местоположения существенно сдерживали ее возможности использования в гражданских целях.
После отмены ограничений на точность определения координат ошибка снизилась со 100 до 20 м (в последних поколениях GPS-приёмников при идеальных условиях ошибка не превышает 2 м). Такие условия позволили использовать систему для широкого круга общих и специальных задач:
- Определение точного местоположения
- Навигация, движение по маршруту с привязкой к карте на основании реального местоположения
- Синхронизация времени

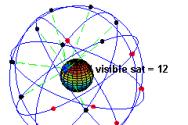
Орбиты спутников системы GPS. Пример видимости спутников из одной из точек на поверхности Земли. Visible sat - это число спутников, видимых над горизонтом наблюдателя в идеальных условиях (чистое поле).
ГЛОНАСС
Российский аналог GPS - ГЛОНАСС (глобальная навигационная спутниковая система) - была развёрнута в 1995 году, но в связи с недостаточным финансированием и малым сроком службы спутников она не получила широкого распространения. Вторым рождением системы можно считать 2001 год, когда была принята целевая программа ее развития, благодаря которой ГЛОНАСС возобновил полноценную работу в 2010 году.
Сегодня на орбите работают 24 спутника ГЛОНАСС, они охватывают навигационным сигналом весь земной шар.
Новейшие потребительские устройства используют GPS и ГЛОНАСС как взаимодополняющие системы, подключаясь к ближайшим найденным спутникам, это значительно увеличивает скорость и точность их работы.

Пример: aвтомобильное GPS/ГЛОНАСС-навигационно-связное устройство на базе ОС Android, разработанное командой Promwad по заказу российского конструкторского бюро. Реализована поддержка GSM/GPRS/3G. Устройство автоматически обновляет информацию о дорожной обстановке в режиме реального времени и предлагает водителю оптимальный маршрут с учётом загруженности дорог.
Сейчас на стадии разработки находятся еще две спутниковые системы: европейская Galileo и китайская Compass.
Galileo
Галилео - совместный проект Европейского союза и Европейского космического агентства, анонсированный в 2002 году. Изначально рассчитывали, что уже в 2010 году в рамках этой системы на средней околоземной орбите будут работать 30 спутников. Но этот план не был реализован. Сейчас предположительной датой начала эксплуатации Galileo считается 2014 год. Однако ожидается, что полнофункциональное использование системы начнется не ранее 2020 года.
Compass
Это следующая ступень развития китайской региональной навигационной системы Beidou, которая была введена в эксплуатацию после запуска 10 спутников в конце 2011 года. Сейчас она обеспечивает покрытие в границах Азии и Тихоокеанского региона, но, как ожидается, к 2020 году система станет глобальной.

Сравнение орбит спутниковых навигационных систем GPS, ГЛОНАСС, Galileo и Compass (средняя околоземная орбита - MEO) с орбитами Международной космической станции (МКС), телескопа Хаббл и серии спутников Иридиум (Iridium) на низкой орбите, а также геостационарной орбиты и номинального размера Земли.
Поддержка ГНСС
Поддержка технологи глобальных навигационных спутниковых систем (ГНСС) в электронных устройствах реализуется на базе навигационных приемников, которые могут быть выполнены в различных вариантах:- Smart Antenna - модуль, состоящий из керамической антенны и навигационного приемника. Преимущества: компактность, не требует согласования, удешевляет разработку за счет сокращения сроков.
- MCM (Multi Chip Module) - чип, включающий все компоненты навигационного приемника.
- OEM - экранированная плата, включающая ВЧ интерфейсный процессор и процессор частот основной полосы (RF-frontend + baseband), SAW-фильтры и обвязку. Это наиболее популярное решение на данный момент.
Ключевые параметры навигационных приемников
Прежде чем навигационный приемник сможет выдавать информацию о местоположении, он должен обладать тремя наборами данных:- Сигналы от спутников
- Альманах - информация о приблизительных параметрах орбит всех спутников, а также данные для калибровки часов и характеристики ионосферы
- Эфемериды - точные параметров орбит и часов каждого спутника
Производители приемников используют различные методы уменьшения TTFF, включая скачивание и сохранения альманаха и эфемерид по беспроводным сетям передачи данных (т.н. метод Assisted GPS или A-GPS), это быстрее чем извлечение этих данных из сигналов ГНСС.
Холодный старт описывает ситуацию, когда приемнику нужно получение всей информации для определения места. Это может занять до 12 минут.
Теплый старт описывает ситуацию, когда у приемника есть почти вся необходимая информация в памяти, и он определит место в течении минуты.
Одним из ключевых параметров навигационных модулей в мобильных устройствах является энергопотребление. В зависимости от режима работы модуль потребляет различное количество энергии. Фаза поиска спутников (TTFF) характеризуется большим, а слежение меньшим энергопотреблением. Также производители реализуют различные схемы уменьшения энергопотребления, например, путем периодического перевода модуля в режим сна.
Как правило, все модули выдают данные по текстовому протоколу NMEA-0183 , но кроме указанного текстового протокола каждый производитель имеет свой собственный двоичный протокол (Binary), который позволяет изменять конфигурацию модуля под конкретное использование либо получать доступ к дополнительному функционалу, а также доступ к сырым измерениям. Двоичный протокол удобен для использования на микроконтроллерах, т.к. при этом нет необходимости выполнять преобразование из текста в двоичные данные, тем самым экономя программную память путем исключения библиотеки работы со строками и времени на преобразование.
Стандарт NMEA-2000 - это развитие протокола NMEA-0183. В качестве физического уровня в NMEA-2000 используется CAN-шина, которая была выбрана в виду большей защищенности по сравнению с RS-232. С точки зрения протокола передачи данныхNMEA-2000 существенно отличается от своего предшественника, т.к. использует двоичный протокол, базирующийся на стандарте SAE J1939.
Частота обновления данных о местоположении и скорости всех модулей составляет 1 Гц, но при необходимости ее можно поднять до 5 или 10 Гц.
В зависимости от области применения модуль можно сконфигурировать под определенные динамические характеристики , которые он должен отслеживать (например, максимальное ускорение объекта). Это позволяет использовать оптимальный алгоритм и улучшать качество измерений.
Для выполнения навигационной задачи модуль должен одновременно принимать сигналы от нескольких спутников, т.е. иметь несколько приемных каналов . На сегодняшний день это число лежит в диапазоне от 12 до 88.
Точность определения местоположения по GPS составляет в среднем 15 м, она обусловлена используемым неточным сигналом, влиянием атмосферы на распространение радиосигнала, качеством кварцевых генераторов в приемниках и пр. Но с помощью корректирующих методов возможно улучшить точность определения местоположения. Эта технология называется Differential GPS . Существует два метода коррекции: наземный и спутниковый DGPS.
В наземных методах коррекции наземные станции дифференциальных поправок постоянно сверяют свое заведомо известное местоположение и сигналы от навигационных спутников. На базе этой информации вычисляются корректирующие величины, которые могут быть переданы с помощью УКВ- или ДВ-передатчика на мобильные DGPS-приемники в формате RTCM . На основании полученной информации потребитель может корректировать процесс определения собственного местоположения. Точность этого метода составляет 1-3 метра и зависит от расстояния до передатчика корректирующей информации и качества сигнала.
Спутниковые методы, такие как система WAAS (Wide Area Augmentation System), доступная в Северной Америке, и система EGNOS (European Geostationary Navigation Overlay System), доступная в Европе, шлют корректирующие данные с геостационарных спутников, таким образом достигается бо льшая область приема, чем при наземных методах.

Спутниковые системы дифференциальной коррекции (SBAS - Space Based Augmentation Systems) позволяют улучшить точность, надежность и доступность навигационной системы за счет интеграции внешних данных в процессе расчета

Демонстрация принципа работы системы WAAS (Wide Area Augmentation System) на территории США
Одним из основных параметров, влияющих на точность определения местоположения и стабильность приема является чувствительность . Она, как правило, определяется качеством малошумящего усилителя на входе приемника и сложностью реализованных алгоритмов цифровой обработки. Типовые значения современных приемников лежат в диапазоне 143 дБм для поиска и 160 дБм для слежения.
Кроме определения местоположения ГНСС предоставляют информацию о точном времени. Как правило, все приемники имеют выход PPS (pulse per second, импульсов в секунду) - секундная метка (1 Гц), которая точно синхронизирована с временной шкалой UTC.
Дополнительные функции навигационных устройств
Счисление пути . На основе информации о направлении движения и пройденном пути (предоставляется дополнительными датчиками) приемник может рассчитывать свои координаты при отсутствии сигналов от спутников (например, в туннелях, на подземных стоянках и в плотной городской застройке).Некоторые модули имеют возможность напрямую подключать флэш-память (например, по SPI) к модулю для записи трека c необходимой периодичностью. Эта функция позволяет отказаться от использования отдельного микроконтроллера, либо она может быть полезной для минимизации энергопотребления (т.е. система на кристалле может находиться в состоянии сна).
На этом поверхностный обзор технологий глобальной спутниковой навигации завершен. Спасибо за внимание. Примеры реализованных проектов на базе этих ГЛОНАСС и GPS можно посмотреть на странице
Спутниковые системы навигации – комплексные электронно-технические системы, состоящие из совокупности наземного (приемники) и космического оборудования (спутники). Они предназначены для определения местоположения (географических координат и высоты), а также параметров движения (скорости, направления движения и т. д.) для наземных, водных и воздушных объектов. Для краткого обозначения этих систем пользуются или аббревиатурой GNSS (от англ. Global Navigation Satellites System – глобальная навигационная спутниковая система) или NAVSTAR (от англ. NAVigation Satellites providing Time And Range – измерение времени и расстояния от навигационных спутников).
Принципы работы спутниковых систем навигации , если не обращать внимания на их техническую реализацию, достаточно просты. На околоземную орбиту запущены специальные навигационные спутники. Работа приемника GNSS заключается в том, чтобы найти четыре или более из этих спутников, выяснить расстояние до каждого и использовать эту информацию для вычисления собственного месторасположения.
Поскольку скорость распространения радиосигналов постоянна и равна скорости света, расстояние до спутников определяется по задержке времени приема сообщения GNSS-приемником относительно времени отправки сообщения с борта спутника. GNSS-приемник, зная взаимное расположение спутников, вычисляет свои координаты по законам геометрии, т. е. все работает по принципу простого школьного уравнения, когда, зная взаимное расположение трех точек, ищут положение четвертой, при условии, что известно расстояние от четвертой точки до каждой из трех.
Таким образом, для определения двух координат (широта и долгота) GNSS-приемнику нужно знать расстояние до трех спутников и время GNSS-системы. Для определения координат и высоты приемника, используются сигналы как минимум с четырех спутников.Для того чтобы произвести эти измерения, приемнику и спутнику необходимы часы, которые должны быть синхронизированы до наносекунды. Разработчики GNSS нашли умное и эффективное решение этой проблемы. Каждый спутник содержит дорогие атомные часы, но сам приемник использует обычные кварцевые, которые он постоянно переустанавливает по сигналам со спутников.
После того как приемник произведет расчеты, он сообщит Вам широту, долготу и высоту своего местонахождения. Для того чтобы сделать навигацию более удобной для пользователей, большинство приемников привязывают эти данные к картам, хранящимся в их памяти.
В настоящее время в мире реализовано несколько спутниковых систем навигации, которые работают по одним и тем же изложенным выше принципам.
GPS (от англ. Global Positioning System – глобальная система позиционирования)разработана, реализована и эксплуатируется Министерством обороны США. Первый тестовый спутник выведен на орбиту 14 июля 1974 г. В 1991 г. на орбиту выведено 24 спутника, которые обеспечили полное покрытие земного шара. Сейчас на орбите 30 спутников. Каждый из них вращается вокруг планеты на высоте примерно 20 000 км, делая два полных оборота каждый день. Орбиты расположены так, что в любое время и в любом месте на Земле есть по крайней мере четыре спутника, «видимых» в небе.
GPS была разработана Министерством обороны США для нужд военных. Ее можно использовать для точного наведения ракет на неподвижные и подвижные объекты в воздухе и на земле.
Система работает одновременно в двух режимах – военном и гражданском. Для военных армии США и их союзников, погрешность определения координат с помощью GNSS составляет несколько сантиметров. Для всех остальных точность составляет около 5 м, в зависимости от условий приема. К сожалению, точность навигации сильно зависит от открытости пространства, от высоты используемых спутников над горизонтом. Невысокое наклонение орбит GPS серьезно ухудшает точность в приполярных районах Земли, так как спутники GPS невысоко поднимаются над горизонтом.
ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) – советская и российская спутниковая система навигации, разработана по заказу Министерства обороны СССР. Основой системы являются 24 спутника, движущихся над поверхностью Земли в трех орбитальных плоскостях с наклоном 64,8° на высоте 19 100 км. В настоящее время развитием проекта ГЛОНАСС занимается Федеральное космическое агентство (Роскосмос) и ОАО «Российские космические системы».
Первый спутник ГЛОНАСС был выведен Советским Союзом на орбиту 12 октября 1982 г. 24 сентября 1993 г. система была официально принята в эксплуатацию с орбитальной группировкой из 12 спутников. В декабре 1995 г. спутниковая группировка была развернута до штатного состава – 24 спутника.
Галилео (Galileo ) – совместный проект спутниковой системы навигации Европейского союза и Европейского космического агентства. Система предназначена для решения навигационных задач для любых подвижных объектов с точностью менее 1 м. Ожидается, что «Галилео» войдет в строй в 2014–2016 гг., когда на орбиту будут выведены все 30 запла-нированных спутников (27 операционных и 3 резервных). Система Галилео не контролируется национальными военными ведомствами.
Бэйдоу – развертываемая в настоящее время Китаем подсистема GNSS предназначенная для использования только в этой стране. Особенность – небольшое количество спутников, находящихся на геостационарной орбите.
IRNSS – индийская навигационная спутниковая система, в состоянии разработки. Предполагается для использования только в этой стране. Первый спутник был запущен в 2008 г.
В ближайшей перспективе будут одновременно работать три глобальных навигационных спутниковых системы – GPS, ГЛОНАСС и Галилео. Одним из основных принципов развития этих систем является отсутствие прямой платы за пользование их услугами. Кроме этого, развитию систем способствует направленность на международное сотрудничество в области их совместимости и взаимодополняемости и как следствие – использование одной системы в комбинации с другими спутниковыми или наземными радионавигационными системами для повышения точности и надежности навигационных определений.
Несмотря на то, что изначально проекты GPS и ГЛОНАСС были направлены на военные цели, сегодня они все чаще используются в гражданских целях.
В настоящее время наиболее развернутой и развитой с точки зрения распространенности технических средств является система GPS. В связи этим ее название часто используется как нарицательное при любом разговоре о спутниковых навигационных системах.
Применение спутниковых навигационных систем. Независимо от класса и решаемых задач в основе любой навигационной системы лежит электронная картография. Спутниковые навигаторы не только сообщат координаты Вашего местоположения, но и свяжут его с электронной картой. Картографические GNSS системы можно использовать в любых приложениях требующих точной временной привязки и привязки положений с другой атрибутивной информацией.
Потребителям предлагаются различные устройства и программные продукты, позволяющие видеть свое местонахождение на электронной карте: имеющие возможность прокладывать маршруты с учетом дорожных знаков, разрешенных поворотов и даже пробок; искать на карте конкретные дома и улицы, достопримечательности, кафе, больницы, автозаправки и прочие объекты инфраструктуры. GNSS-приемники продают во многих магазинах, торгующих электроникой, их встраивают в мобильные телефоны, смартфоны, КПК.
Наиболее распространенными являются приемники GNSS для индивидуального использования водителями автомобильного транспорта. Они имеют размер карманного калькулятора с клавиатурой и жидкокристаллическим дисплеем. Приемник GNSS не только укажет Ваше место на карте, но также способен отслеживать по карте Ваши перемещения. Если Вы оставите приемник включенным, он может находиться в постоянной связи со спутниками GNSS, чтобы отслеживать изменение Вашего положения. С помощью этой информации и встроенных часов приемник может дать Вам следующие сведения:
· местонахождение;
· наиболее короткий и удобный путь до пункта назначения;
· как далеко Вы уже уехали;
· как долго Вы путешествуете;
· скорость движения (в настоящий момент, максимальная, минимальная, средняя);
· время в пути (прошедшее и сколько еще потребуется).
Автомобильные GNSS-приемники – это, по сути, электронные лоцманы, дающие указания водителю синтезированным голосом, заранее сообщая обо всех поворотах, стоянках и прочих особенностях данного маршрута. В большом городе иногда сложно сориентироваться даже тем, кто прожил там всю жизнь. Что уж говорить о приезжих. Да и за пределами города несложно потеряться. Так что GNSS-навигатор – очень полезная и иногда даже необходимая вещь. Особенно если речь идет о начинающем водителе или человеке, который первый раз оказался в незнакомом городе.
В последнее время получает широкое распространение весьма удачная интеграция GNSS, радиосвязи и компьютерной техники – диспетчерские навигационные системы, предназначенные для централизованного контроля за передвижением автомобилей. В этих системах каждый автомобиль оснащен GNSS-приемником и радиосвязным оборудованием для контакта с диспетчерским пунктом. На экране монитора диспетчера формируется электронная цифровая карта территории, которая обслуживается транспортными средствами. Закодированная информация о координатах и скорости движения автомобилей, получаемая по радиоканалу, позволяет отобразить их текущее положение на этой карте. Параллельно этой информации по радиолинии могут автоматически передаваться сведения от самых разных датчиков, установленных на автомобиле: например, о несанкционированном вскрытии контейнеров, о наличии топлива, об остановках, ДТП, авариях и т. п.
Такие диспетчерские GNSS-системы могут успешно использоваться в торговых и транспортных компаниях, а также в поисковых и аварийных службах, инкассации банков, в МВД и т. п. Элементы таких систем могут устанавливаться в автомобилях скрытно. В случае попытки угона устройство автоматически сообщит координаты автомобиля, по которым соответствующая служба сможет его найти.
Системы спутникового мониторинга транспорта решают следующие задачи.
1. Контроль за целевым использованием транспорта. Проверяется действительный маршрут, пройденный транспортным средством, точки остановок, скоростной режим, расход топлива, время работы механизмов.
2. Контроль соблюдения графика движения. На карте определяются контрольные зоны. Проверяется время пересечения границ зон.
3. Сбор статистки и оптимизация маршрутов. Проанализировав пройденные маршруты на предмет скоростного режима и расхода топлива, диспетчер может разработать новые, более эффективные.
4. Обеспечение безопасности. Знание местоположения позволяет быстро найти угнанное либо попавшее в беду транспортное средство. Автомобили специального назначения, такси могут оборудоваться скрытой кнопкой, нажатие на которую отсылает тревожный сигнал в диспетчерский центр.
5. Помощь водителю в выборе маршрута на местности. Зная местонахождение транспортного средства, диспетчер может посоветовать водителю маршрут движения в незнакомой местности.
Система спутникового мониторинга транспорта включает следующие компоненты:
· транспортное средство, оборудованное GPS- или ГЛОНАСС-контроллером или трекером, который получает данные от спутников и передает их на серверный центр мониторинга посредством GSM, CDMA, Wi-Fi, Bluetooth или реже космической и УКВ связи;
· серверный центр с программным обеспечением для приема, хранения, обработки и анализа данных;
· компьютер диспетчера, ведущего мониторинг автомобилей.
Большинство GNSS-контроллеров и трекеров имеют схожие функциональные возможности:
· вычисление собственное местоположение, скорость и направление движения на основании сигналов спутников систем глобального позиционирования GPS;
· подключение внешних датчиков через аналоговые или цифровые входы;
· считывание данных с бортового оборудования;
· хранение некоторого объема данных во внутренней памяти на период отсутствия связи;
· передача полученных данных на серверный центр, где происходит их обработка.
Для получения дополнительной информации на транспортное средство устанавливаются дополнительные датчики, подключаемые к GPS- или ГЛОНАСС-контроллеру, например:
· датчик расхода топлива;
· датчик нагрузки на оси транспортного средства;
· датчик уровня топлива в баке;
· датчик температуры в рефрижераторе;
· датчики, фиксирующие факт работы или простоя спецмеханизмов (поворот стрелы крана, работы бетоносмесителя), факт открывания двери или капота, факт наличия пассажира (такси).
Использование систем спутникового мониторинга повышает качество и эффективность работы корпоративного транспорта, и в среднем на 20–25 % снижают расходы на топливо и содержание автопарка. Примерами использования таких диспетчерских систем могут похвастаться уже десятки городов России.
29 января 2009 г. было объявлено, что первым городом страны, где общественный транспорт в массовом порядке оснащен системой спутникового мониторинга на базе ГЛОНАСС, стал Сочи. На тот момент ГЛОНАСС-оборудование было установлено на 250 сочинских автобусах.
С недавних пор за всеми передвижениями автомобилей скорой помощи в Благовещенске следят диспетчеры в специальном сервисе, который был создан для сокращения времени прибытия к больному. В оперативном отделе станции рабочие места оборудованы электронной картой Благовещенска, и теперь местонахождение бригад скорой помощи, их маршрут, параметры скорости и времени движения диспетчер без труда может отслеживать по монитору.
Пермское отделение Свердловской железной дороги начало подготовку к реализации пилотного проекта по внедрению спутниковой системы контроля ITARUS-АТС. Система призвана осуществлять контроль из центра оперативного управления за скоростью и местонахождением поездов. Кроме того, она проводит непрерывную диагностику подвижного состава, при необходимости автоматически отдает команды на экстренные остановки или временное ограничение скорости. Ожидается, что внедрение системы повысит пропускную способность линий и позволит сократить расходы на эксплуатацию и техническое обслуживание железнодорожной инфраструктуры. По итогам опытной эксплуатации в Пермском крае планируется распространить данную технологию на сеть российских железных дорог.
Развитие систем GNSS-диспетчеризации осуществляется в рамках постановления Правительства РФ от 03.08.1999 г. № 896 «Об использовании в Российской Федерации глобальных навигационных спутниковых систем на транспорте и в геодезии».
Рассмотрим другие сферы применения спутниковых навигационных систем.
Специалисты, работающие в области природных ресурсов – геологи, географы, лесники и биологи используют GNSS картографические системы для записи положений и дополнительной информации об объектах. Например, лесники в качестве дополнительной информации могут регистрировать возраст, состояние, количество и тип леса. Они могут также проводить съемку территорий, подлежащих вырубке или посадке. Биологи имеют возможность регистрировать ареалы расселения диких животных, маршруты их миграций, численность популяций и другую информацию.
GNSS оказывается крайне эффективным в городском хозяйстве при съемке канализационных, газовых и водных трубопроводов, а также электрических и телефонных линий. Такие объекты, как крышки колодцев и пожарные гидранты, картографируются как точки с соответствующей атрибутивной информацией. Кроме того, с помощью GNSS можно выполнять съемку земельных участков, участков проведения строительных работ, объектов улиц и заводов.
GNSS картографические системы помогают описывать особенности участков полей, находящихся в интенсивном сельскохозяйственном применении. Вы можете точно связать такие характеристики, как микроклимат, тип почвы, участки поврежденные насекомыми или болезнями, объем собираемой продукции и т. п., с их местоположением. Положение трактора может быть использовано совместно с данными о типе почвы для более экономного расхода удобрений или химических распылителей. Это напрямую снижает стоимость затрат на удобрения и уменьшает загрязнение природных водных источников этими веществами. Кроме того, GNSS можно использовать для картографирования местоположения колодцев и других источников воды; записи размеров озер и их состояния; регистрации ареалов распространения рыбы и диких животных; изменений береговой линии, полевых угодий и климатических зон.
Археологи и историки могут использовать картографические GNSS- системы для навигации и регистрации раскопок и исторических мест.
Навигационные возможности систем могут оказать неоценимую помощь в поиске и спасении людей, в работе милиции и пожарных при экстренном поиске определенного местоположения. Еще в 1990-х гг. появились первые сотовые телефоны с GNSS. В некоторых странах, например США, это используется для оперативного определения местонахождения человека, звонящего по телефону службы спасения. В России в 2010 г. начата реализация аналогичного проекта – Эра-ГЛОНАСС.
ВВЕДЕНИЕ.. 1
1. РЫНОК ИНФОРМАЦИОННЫХ ПРОДУКТОВ.. 1
1.1 ИНФОРМАЦИОННЫЕ РЕСУРСЫ 1
1.2. ИНФОРМАЦИОННЫЕ ПРОДУКТЫ И УСЛУГИ 3
1.3. РЫНОК ИНФОРМАЦИОННЫХ ПРОДУКТОВ И УСЛУГ 5
1.4. СТРУКТУРА ИНФОРМАЦИИ 9
3.2. Как соотносятся информационная технология и информационная система. 10
2. ОПРЕДЕЛЕНЕ И КЛАССИФИКАЦИЯ ИНФОРМАЦИОННЫХ СИСТЕМ... 11
2.1. ОПРЕДЕЛЕНИЕ ИНФОРМАЦИОННОЙ СИСТЕМЫ 11
2.2. КЛАССИФИКАЦИЯ ИНФОРМАЦИОННЫХ СИСТЕМ 15
2.2.1. По признаку структурированности задач. 15
2.2.2. По функциональному признаку и уровням управления. 17
2.2.3. Классификация по характеру обрабатываемой информации. 25
2.2.3. Классификация по целевым функциям. 25
3. Классификация по видам процессов управления. 26
4. Классификация по отраслевому и территориальному признаку. 28
2.2.3. Классификация по степени автоматизации. 28
По степени открытости. 29
По режиму работы.. 30
3. СТРУКТУРА АВТОМАТИЗИРОВАННЫХ ИНФОРМАЦИОННЫХ СИСТЕМ 30
3.1. Состав и назначение структурных элементов АИС. 30
3.2. Технологическое обеспечение АИС.. 33
4. СТАДИИ И ЭТАПЫ ПРОЕКТИРОВАНИЯ АИС И АИТ.. 37
4.1. Общие принципы проектирования. 37
4.5. План постановки задачи. 55
5. Автоматизированное рабочее место – средство автоматизации работы конечного пользователя. 58
6. РАБОТА С ЭЛЕКТРОННЫМИ ДОКУМЕНТАМИ.. 61
6.1. Электронизация делопроизводства. 62
6.2. Выбор программного обеспечения для работы с электронными документами 67
6.3. Классификаторы и кодировки в электронных документах. 80
6.4. Автоматизация идентификации объектов. Штрих-кодирование. 83
7. ИНФОРМАЦИОННО-КУММУНИКАЦИОННЫЕ ТЕХНОЛОГИИ – ОСНОВА РЫНКА ЭЛЕКТРОННЫХ УСЛУГ. 88
7.1. Электронное правительство. 91
7.2. Финансовые услуги через Интернет. 98
7.3. Общественные информационно-коммуникационные интерактивные системы сервисов. 102
7.4. Спутниковые навигационные системы и их использование. 108
Навигационная система - это совокупность приборов, обеспечивающих навигацию (ориентирование) объекта в пространстве. Навигационные системы обеспечивают ориентацию с помощью: карт, имеющих видео,графический или текстовый форматы; определение местоположения с помощью датчиков или других внешних источников; автономных средств, таких как спутниковая связь и т.п.; информации от других объектов. Спутниковая система навигации - комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов. Основные элементы спутниковой системы навигации:
- Орбитальная группировка, состоящая из нескольких (от 2 до 30) спутников, излучающих специальные радиосигналы;
- Наземная система управления и контроля, включающая блоки измерения текущего положения спутников и передачи на них полученной информации для корректировки информации об орбитах;
- Приёмное клиентское оборудование («спутниковых навигаторов»), используемое для определения координат;
- Опционально: наземная система радиомаяков, позволяющая значительно повысить точность определения координат.
- Опционально: информационная радиосистема для передачи пользователям поправок, позволяющих значительно повысить точность определения координат.
Россия занимает третье место по числу спутников связи
По данные на конец 2016 года Россия занимает третье место по количеству спутников связи, обладая 17 космическими аппаратами. Страна уступает по этому показателю Франции, у которой спутников вдвое больше – 34, а также малому государству – Люксембургу, который владеет 108 аппаратами. Об этом сообщал ТАСС со ссылкой на генконструктора ОАО "Газпром космические системы " Николая Севастьянова. Япония обладает 16 спутниками связи, на пятом месте располагаются США и Гонконг, у которых по 11 аппаратов.
Объем мирового рынка космической связи, существующего уже 45 лет, составляет $153 млрд с годовым приростом в 3%. Основную часть его составляет ТВ, радио и интернет - $104 млрд. Сегмент каналов связи оценивается в $18 млрд, подвижная связь – в $3 млрд.
Что такое GPS мониторинг транспорта?
GPS мониторинг транспорта это непрерывное слежение за автомобилями Вашего автопарка. Система мониторинга транспорта позволяет осуществлять GPS слежение в режиме реального времени. GPS оборудование, установленное на автомобиле, запрашивает свое местоположение у одного из спутников группировки GPS и, в режиме онлайн передает информацию диспетчеру. Подобная система навигации GPS позволила выйти с уровня простого контроля перемещения транспорта на уровень полноценного слежения за транспортом.
При внедрении системы GPS /ГЛОНАСС мониторинга транспорта помимо слежения за транспортом осуществляется постоянный контроль уровня топлива, состояние автомобиля, его точные координаты, время, в течении которого автомобиль находился в простое или в движении и многое другое.
Поскольку сигнал идет в режиме реального времени, современные системы контроля транспорта выполняют гораздо больше функций чем просто GPS мониторинг автомобилей. Сегодня, отслеживая перемещение транспорта, GPS оборудование позволяет диспетчеру оперативно реагировать в случае возникновения нештатных ситуаций.
Диспетчер в процессе контроля перемещения транспорта может устанавливать голосовую связь с водителем, удаленно заглушить двигатель автомобиля и многое другое. Подобное расширение возможностей транспортного мониторинга позволяют не просто получать информацию о проблемах и нарушениях, влияющих на транспортные издержки компании, но и оперативно нивелировать их.
Установка системы GPS/ГЛОНАСС мониторинга транспорта для постоянного спутникового контроля автомобилей
Сегодня российская система навигации на основе ГЛОНАСС играют важную роль в обеспечении безопасности на государственном уровне. Современная система наблюдения ГЛОНАСС мониторинга транспорта позволяет осуществлять контроль транспорта при помощи российской группировки спутников. Создание группировки спутников началось еще в 80-х годах и включает около 27 спутников. Принцип работы спутников ГЛОНАСС мониторинга схож с американской системой NAVSTAR GPS. Но, в отличие от нее не требует никаких дополнительных обновлений после запуска.